Dobb·E
About Dobb·E
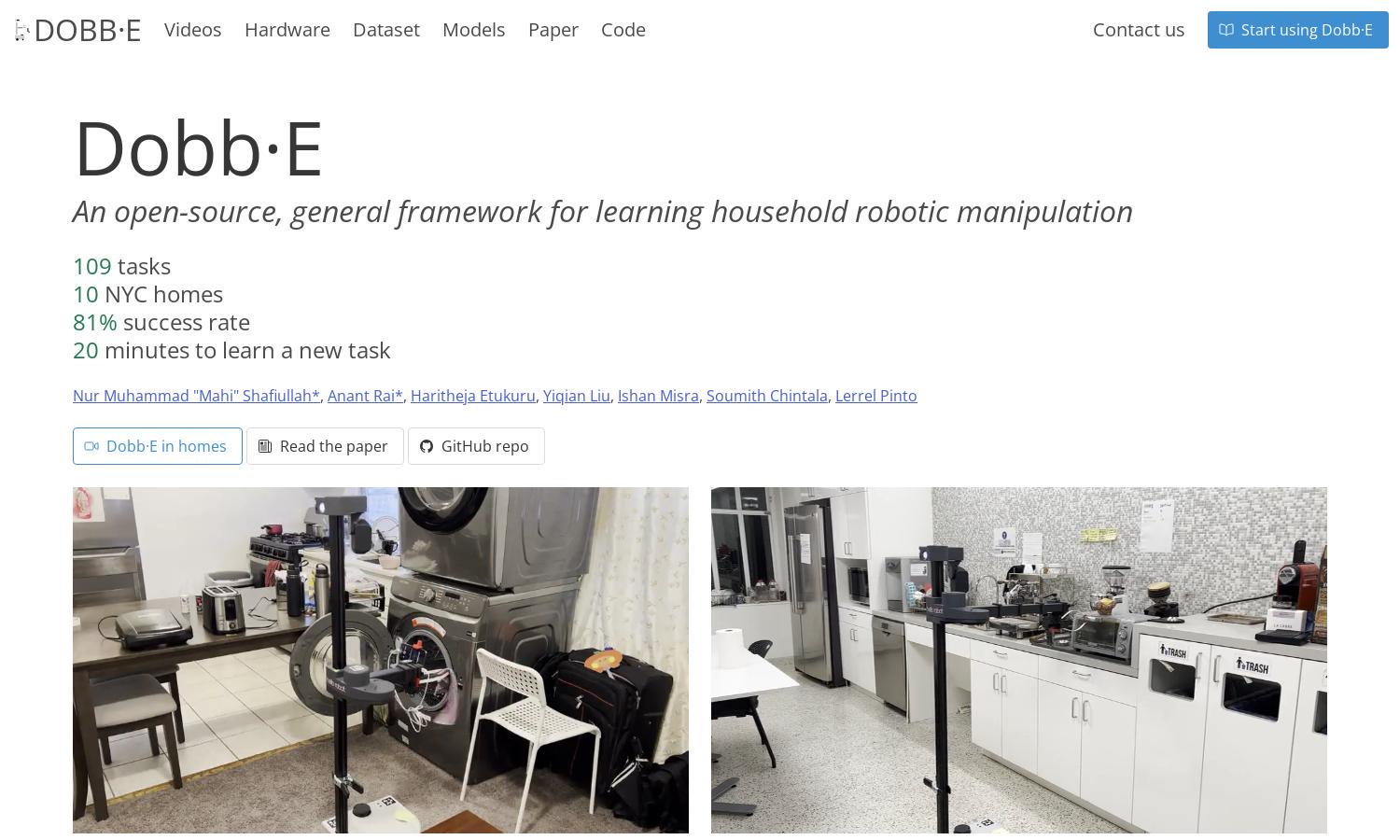
Dobb·E is an innovative open-source framework aimed at transforming home robotics. Targeting researchers and developers, it allows users to teach robots household tasks in under 20 minutes using a simple demonstration tool. Dobb·E's unique ability to learn through imitation provides flexibility and efficiency for various home environments.
Dobb·E offers an open-source solution for home robotics at no cost. Users can access tools and datasets for free, promoting collaborative research. Premium support and advanced features may be available later, enhancing user experience and ensuring comprehensive learning tools for all users.
Dobb·E features a user-friendly interface that simplifies the teaching process for robots. Its intuitive layout and engaging design allow users to easily navigate through tools and datasets. The streamlined experience focuses on efficiency, making it accessible even for non-expert users, enhancing overall interaction quality.
How Dobb·E works
Users interact with Dobb·E by initially utilizing the Stick to collect demonstration data in their homes. After gathering five minutes of demonstrations, Dobb·E adapts its Home Pretrained Representation (HPR) model in just fifteen minutes. This straightforward process allows users to train robots to perform household tasks effectively, presenting a seamless experience.
Key Features for Dobb·E
Imitation Learning
Dobb·E's imitation learning feature enables robots to quickly grasp new household tasks by observing user demonstrations. This unique capability allows for rapid adaptability in diverse home environments, ensuring efficiency and effectiveness in robotic assistance, thus enhancing the everyday user experience.
Homes of New York (HoNY) Dataset
The Homes of New York (HoNY) dataset is pivotal to Dobb·E's functionality, containing 13 hours of diverse interaction data from 22 NYC homes. This extensive dataset enriches the robot's learning process, providing varied scenarios that improve adaptability and performance in real-world settings.
Home Pretrained Representations (HPR)
Home Pretrained Representations (HPR) is a foundational model utilized by Dobb·E that enhances task performance. Trained through comprehensive data collection, HPR empowers robots to adapt swiftly to new tasks, delivering impressive results and significantly improving their operational capabilities within domestic environments.